協働ロボットがわかる・見つかる Cobopedia(コボペディア)
安全柵なしで人と同じ空間で作業ができる協働ロボット。
人材不足を解消すると同時に、優秀な人材を有効活用する鍵となりうる存在です。
とはいえ、市場には多種多様な協働ロボットがあり、自社に導入すべきモデルの選択に難渋しているという方も多いのではないでしょうか。
協働ロボットのメーカーや基本的な情報を網羅した当サイトでは、
人的リソース確保につながる協働ロボットをご紹介します。
協働ロボットがわかる・見つかる Cobopedia(コボペディア)
安全柵なしで人と同じ空間で作業ができる協働ロボット。
人材不足を解消すると同時に、優秀な人材を有効活用する鍵となりうる存在です。
とはいえ、市場には多種多様な協働ロボットがあり、自社に導入すべきモデルの選択に難渋しているという方も多いのではないでしょうか。
協働ロボットのメーカーや基本的な情報を網羅した当サイトでは、
人的リソース確保につながる協働ロボットをご紹介します。
TOPIC
協働ロボットはそのメーカーのバックボーンによって2種類に分けることができ、それぞれ特徴は変わります。
協働ロボットを導入する際はそうした違いを理解しておくと、自社が求めているものが見つけやすくなります。
産業用ロボット発のロボットメーカーは、古くからロボット開発に注力しているため数多くの実績があります。
協働ロボットの設計・開発にも産業用ロボットのノウハウが生かされており、スピーディーで複雑な動作にも対応。
過去のさまざまな経験から、現場が何を求めているのかを熟知しており、歴史があるので安心感があります。
協働ロボット専業メーカーはここ数年でできた会社。当初から人と同じスペースで作業するロボット開発に特化し、コンパクト設計で単純作業を得意とする製品を提供しています。
使いやすさにもこだわっており、複雑なプログラミングを組む必要がありません。簡単な動作なら自社でティーチングも可能で自前化しやすいといえます。
協働ロボットを選ぶ際には、ロボット本体の性能などをチェックすることは大切ですが、メーカーのバックボーンに注目するのも重要ポイントです。システムの仕組みやサポート内容にも関わる部分ですので、さまざまな角度から自社に適しているか見極めましょう。
ATTENTION
協働ロボットは安全柵不要で同じスペースで作業を行うのは共通していても、メーカーにより性能や使い勝手は様々です。
ここでは、日本で数多くの導入実績がある代表的な協働ロボットメーカー4社を厳選紹介します。
 引用元:ABB公式HP
引用元:ABB公式HP
https://new.abb.com/news/ja/detail/67898/abbs-yumi-robot-at-hawa
ABB(ABB株式会社)
 引用元:ABB公式HP
引用元:ABB公式HP
https://new.abb.com/news/ja/detail/67898/abbs-yumi-robot-at-hawa
 引用元:FANUC公式HP
引用元:FANUC公式HP
https://www.fanuc.co.jp/ja/product/robot/model/smallcollabo.html
FANUC
(ファナック株式会社)
引用元:FANUC公式HP
https://www.fanuc.co.jp/ja/product/robot/model/smallcollabo.html
 引用元:Universal
Robots公式HP
引用元:Universal
Robots公式HP
https://www.universal-robots.com/ja/製品ラインナップ/ur20-robot/
Universal Robots
(ユニバーサルロボット)
引用元:Universal
Robots公式HP
https://www.universal-robots.com/ja/製品ラインナップ/ur20-robot/
 引用元:YASKAWA公式HP
引用元:YASKAWA公式HP
https://www.e-mechatronics.com/product/robot/assembly/lineup/hc20dt/spec.html
YASKAWA
(株式会社安川電機)
引用元:YASKAWA公式HP
https://www.e-mechatronics.com/product/robot/assembly/lineup/hc20dt/spec.html
【選定条件】
Google検索で「協働ロボット」と検索した際に表示された上位10サイト全てを調査し、表示されるメーカー及び、イプロスに掲載されている協働ロボットメーカー24社を調査(2023年9月1日調査時点) 。
以下の条件で選定しています。
・ABB...24社のうち最も軸の多い「14軸」の双腕ロボットを扱っている、かつ最高速度2.2m/sを出せる短腕型の協働ロボットをラインナップしている総合メーカー
・FANUC... 24社のうち協働ロボットの可搬重量が50kgと最も重い協働ロボットをラインナップしている総合メーカー
・Universal Robots...2008年に世界で初めて商用協働ロボットを開発※し、75,000を超える製造現場に導入実績があり(2023年9月調査時点)多くの現場で使われている協働ロボット専業メーカー(※参照元:https://www.universal-robots.com/ja/ユニバーサルロボットについて/ニュースセンター/ユニバーサルロボット-可搬重量20kgの協働ロボット-ur20-を発表/)
・YASKAWA...24社のうち協働ロボットのリーチ長が1900mmと最も長い協働ロボットをラインナップしている総合メーカー
EXPLANATION
当サイトがおすすめできる協働ロボットメーカーの特徴をさらに深掘りして解説します。各社の背景やこれまで積み重ねてきた強みなどをまとめました。また各社の導入事例も紹介していますので、ぜひ参考にしてください。
ABB(ABB株式会社)
 引用元:ABB公式HP
引用元:ABB公式HP
https://new.abb.com/products/robotics/ja/industrial-robots/collaborative-robots
安全性と生産性を両立する
ロボットを提供
産業ロボット発のスイスの歴史ある企業で安全性と生産性を両立した協働ロボットを提供しています。ラインナップには単腕型だけでなく14軸の双腕型の協働ロボットもあり、人間と同じような動きをスピーディーに実現。シミュレーションや実機検証で効果も納得の導入が可能です。
 引用元:ABB公式HP
引用元:ABB公式HP 引用元:ABB公式HP
引用元:ABB公式HP 引用元:ABB公式HP
引用元:ABB公式HP 引用元:ABB公式HP
引用元:ABB公式HP 引用元:ABB公式HP
引用元:ABB公式HP| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| GoFa5 (CRB 15000-5) |
5kg | 2.2m/s | 手首950㎜/ フランジ1050㎜ |
0.02 mm | 6 | 28kg |
| GoFa10 (CRB 15000-10) |
10kg | 2m/s | 手首1520㎜/ フランジ1620㎜ |
0.02 mm | 6 | 51kg |
| GoFa12 (CRB 15000-12) |
12kg | 2m/s | 手首1270㎜/ フランジ1370㎜ |
0.02 mm | 6 | 48kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| SWIFTI (CRB 1100) |
4kg | 5m/s | 580 mm | 0.01 mm | 6 | 21kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| SWIFTI (CRB 1300) |
7~11kg | 6.2m/s | 900~1400mm | 0.02 mm | 6 | 75~79 kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| YuMi (Dual Arm: IRB 14000) |
0.5kg (各腕) |
1.5 m/s (各腕) |
560 mm | 0.02 mm | 7 (各腕) |
38 kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| YuMi (Single Arm: IRB 14050) |
0.5kg | 1.5 m/s | 559 mm | 0.02 mm | 7 | 9.48 kg |
※質量:マニピュレーターそのものの重量。
※可搬重量:ロボットの動作性能を維持したまま持ち上げられる重量のこと。
※軸数:ロボットがもつ関節のこと。関節が多いほど、複雑かつ柔軟な動作が可能です。
※最大TCP速度:TCPはTool Center Pointの略称。最大TCP速度とは、ロボットアームの先端の最高速度です。
※位置繰り返し精度:同一条件下で教示したポイントに対して、繰り返し動作させた場合のTCPの変動幅(ばらつき)のこと。値が小さいほど正確に動作することを示しています。
※リーチ長:ロボットアームの長さのこと。長いほど、高いところ、遠いところへの運搬・作業が可能です。
事前検証が的確で
導入前に費用対効果がわかる
静岡のアルミ加工会社・SUSは生産効率を上げるには自動化が有効と考えていましたが、コネクタの独特形状や部品組み合わせ時のひねり動作といった課題がありました。
検討の結果、双腕型協働ロボットYuMiによる解決に着手。熟練度によるばらつきのあった生産量も安定し、精度の高い生産予測・調整が可能になりました。
FANUC
(ファナック株式会社)
 引用元:FANUC公式HP
引用元:FANUC公式HP
https://www.fanuc.co.jp/index.html
産業用ロボットも含む
FA導入全般が得意
CNCやサーボモーターなどFAの総合メーカー。協働ロボットには産業用ロボットの技術が生かされ、ロボドリル、ロボショットなどロボマシン事業にも注力しています。生涯保守や各種研修施設などの充実したサポートが強みです。
 引用元:FANUC公式HP
引用元:FANUC公式HP 引用元:FANUC公式HP
引用元:FANUC公式HP 引用元:FANUC公式HP
引用元:FANUC公式HP 引用元:FANUC公式HP
引用元:FANUC公式HP
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| CRX-5iA CRX-10iA CRX-25iA |
5~25kg | 1000mm/s | 994~1889mm | ±0.03~ ±0.05mm |
6 | 25~135kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| CR-4iA CR-7iA CR-14iA |
4~14kg | 1000mm/s | 550~911mm | ±0.01mm | 6 | 48~55kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| CR-15iA | 15kg | 800~ 1500mm/s |
1441mm | ±0.02mm | 6 | 255kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| CR-35iB | 35kg | 750mm/s | 1831mm | ±0.03mm | 6 | 375kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| CR-35iA | 35kg | 750mm/s | 1813mm | ±0.03mm | 6 | 990kg |
※質量:マニピュレーターそのものの重量。
※可搬重量:ロボットの動作性能を維持したまま持ち上げられる重量のこと。
※軸数:ロボットがもつ関節のこと。関節が多いほど、複雑かつ柔軟な動作が可能です。
※最大TCP速度:TCPはTool Center Pointの略称。最大TCP速度とは、ロボットアームの先端の最高速度です。
※位置繰り返し精度:同一条件下で教示したポイントに対して、繰り返し動作させた場合のTCPの変動幅(ばらつき)のこと。値が小さいほど正確に動作することを示しています。
※リーチ長:ロボットアームの長さのこと。長いほど、高いところ、遠いところへの運搬・作業が可能です。
取り出した野菜をサイズ別に自動仕分け
ファナックは公式YouTubeチャネルで食品・飲料業界向けロボットの活用例として野菜のハンドリングシステムを紹介しています。カゴに入ったキャベツを傷めないようにそっと取り出して測定台の上に載せ、センサが重さ・大きさを測定した後、LARGE・MEDIUM・SMALLに自動仕分けされていく様子がわかります。
Universal Robots
(ユニバーサルロボット)
 引用元:Universal Robots公式HP
引用元:Universal Robots公式HP
https://www.universal-robots.com/ja/
協働ロボット専業で
高い世界シェアを獲得
2005年設立の協働ロボットの専業メーカー。協働ロボットを通じた製造現場の生産性・品質向上と自動化が目標です。軽量な単腕型ロボットを提供しており、世界の協働ロボット市場50%のシェアを獲得しています。
Universal
Robotsの
協働ロボットについて
公式HPで詳しく知る
 引用元:Universal
Robots公式HP
引用元:Universal
Robots公式HP 引用元:Universal
Robots公式HP
引用元:Universal
Robots公式HP 引用元:Universal
Robots公式HP
引用元:Universal
Robots公式HP 引用元:Universal
Robots公式HP
引用元:Universal
Robots公式HP 引用元:Universal Robots公式HP
引用元:Universal Robots公式HP| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| UR3e | 3 kg | 1m/s | 500mm | ±0.03mm | 6 | 11.2 kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| UR5e | 5kg | 1m/s | 850mm | ±0.03mm | 6 | 20.6kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| UR10e | 10kg | 1m/s | 1300mm | ±0.03mm | 6 | 33.5kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| UR16e | 16kg | 1m/s | 900mm | ±0.05mm | 6 | 33.1kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| UR20 | 20 kg | 2m/s | 1750mm | ±0.05mm | 6 | 64 kg |
※質量:マニピュレーターそのものの重量。
※可搬重量:ロボットの動作性能を維持したまま持ち上げられる重量のこと。
※軸数:ロボットがもつ関節のこと。関節が多いほど、複雑かつ柔軟な動作が可能です。
※最大TCP速度:TCPはTool Center Pointの略称。最大TCP速度とは、ロボットアームの先端の最高速度です。
※位置繰り返し精度:同一条件下で教示したポイントに対して、繰り返し動作させた場合のTCPの変動幅(ばらつき)のこと。値が小さいほど正確に動作することを示しています。
※リーチ長:ロボットアームの長さのこと。長いほど、高いところ、遠いところへの運搬・作業が可能です。
ロボットに単純作業を任せ作業効率アップ
精密・医療機器向けのガラスを製造する硝子会社は自動化を推進していましたが、従来型の産業用ロボットは、設置スペースが取られるのとプログラミングを外注しなければならないのが課題でした。
そこで解決策として安全柵が不要で人と協働できるURロボットを採用。単純作業をロボットに任せることで作業効率が上がりました。
YASKAWA
(株式会社安川電機)
 引用元:YASKAWA公式HP
引用元:YASKAWA公式HP
https://www.e-mechatronics.com/product/robot/special/hc10/
モーター製造から協働ロボットまで
幅広く展開
安川電機はモーター事業を柱にさまざまな分野に展開しています。産業用ロボットもその一つで、協働ロボットは操作性に優れ、PFLや挟み込み離脱機能など安全対策に注力。またロボットスクールなど教育体制も整っています。
 引用元:YASKAWA公式HP
引用元:YASKAWA公式HP 引用元:YASKAWA公式HP
引用元:YASKAWA公式HP 引用元:YASKAWA公式HP
引用元:YASKAWA公式HP 引用元:YASKAWA公式HP
引用元:YASKAWA公式HP 引用元:YASKAWA公式HP
引用元:YASKAWA公式HP 引用元:YASKAWA公式HP
引用元:YASKAWA公式HP| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| MOTOMAN- HC10DTP |
10 kg | 1000 mm/s(協働運転 モード) |
1379 mm | 0.05 mm | 6 | 48 kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| MOTOMAN- HC10DTP ハンドキャリータイプ |
10 kg | 1000 mm/s(協働運転 モード) |
1379 mm | 0.05 mm | 6 | 238 kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| MOTOMAN- HC10SDTP (防じん・ 防滴仕様) |
10 kg | 1000 mm/s(協働運転 モード) |
1082 mm | 0.05 mm | 6 | 56 kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| MOTOMAN- HC20DTP (防じん・ 防滴仕様) |
20 kg | 1000 mm/s(協働運転 モード) |
1379 mm | 0.05 mm | 6 | 140 kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| MOTOMAN- HC20SDTP (防じん・ 防滴仕様) |
20 kg | 6 | 1000 mm/s(協働運転 モード) |
0.05 mm | 1412 mm | 97 kg |
| モデル | 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 |
|---|---|---|---|---|---|---|
| MOTOMAN- HC30PL (防じん・ 防滴仕様) |
30 kg | 1000 mm/s(協働運転 モード) |
1600 mm | 0.05 mm | 6 | 140 kg |
※質量:マニピュレーターそのものの重量。
※可搬重量:ロボットの動作性能を維持したまま持ち上げられる重量のこと。
※軸数:ロボットがもつ関節のこと。関節が多いほど、複雑かつ柔軟な動作が可能です。
※最大TCP速度:TCPはTool Center Pointの略称。最大TCP速度とは、ロボットアームの先端の最高速度です。
※位置繰り返し精度:同一条件下で教示したポイントに対して、繰り返し動作させた場合のTCPの変動幅(ばらつき)のこと。値が小さいほど正確に動作することを示しています。
※リーチ長:ロボットアームの長さのこと。長いほど、高いところ、遠いところへの運搬・作業が可能です。

狭くて難しかった手元作業の自動化を実現
手元作業が多い部品のハンドリング・組立は自動化したくても作業スペースが狭く、ロボットを設置するスペースが確保できませんでした。
そこで安全柵が不要な人協働ロボットMOTOMAN-HC10SDTPを採用。ショートアーム仕様なので稼働エリアが少なく済み、省スペース化と自動化で作業時間短縮を実現しました。
SPEC
性能面に注目して協働ロボットを比較検討したいという方に向け、各メーカーの代表製品のスペックを一覧表にまとめました。 可搬重量やTCP速度など自社の現場に適しているかどうか判断するデータとしてご活用ください。
▼スクロールできます▼
| 可搬重量 | 最大TCP速度 | リーチ長 | 位置繰り返し精度 | 軸数 | 質量 | |
|---|---|---|---|---|---|---|
|
GoFa
(CRB 15000)
引用元:ABB公式HP |
5~12kg | 2.2m/s | 950~ 1520mm |
0.02mm | 6 | 28~51kg |
|
SWIFTI
(CRB 1100)
引用元:ABB公式HP |
4kg | 5m/s | 580mm | 0.01mm | 6 | 21kg |
|
SWIFTI
(CRB 1300)
引用元:ABB公式HP |
7~11kg | 6.2m/s | 900~ 1400mm |
0.02mm | 6 | 75~79kg |
|
YuMi
(Dual Arm:IRB 14000)
引用元:ABB公式HP |
0.5kg (各腕) |
1.5m/s (各腕) |
560mm | 0.02mm | 7(各腕) | 38kg |
|
YuMi
(Single Arm:IRB 14050)
引用元:ABB公式HP |
0.5kg | 1.5m/s | 559mm | 0.02mm | 7 | 9.48kg |
|
CRX-5iA
CRX-10iA CRX-25iA
引用元:FANUC公式HP |
5~25kg | 1000mm/s | 994~ 1889mm |
±0.03~ ±0.05mm |
6 | 25~135kg |
|
CR-4iA
CR-7iA CR-14iA
引用元:FANUC公式HP |
4~14kg | 1000mm/s | 550~ 911mm |
±0.01mm | 6 | 48~55kg |
|
CR-15iA
引用元:FANUC公式HP |
15kg | 800~ 1500mm/s |
1441mm | ±0.02mm | 6 | 255kg |
|
CR-35iB
引用元:FANUC公式HP |
35kg | 750mm/s | 1831mm | ±0.03mm | 6 | 375kg |
|
CR-35iA
引用元:FANUC公式HP |
35kg | 750mm/s | 1813mm | ±0.03mm | 6 | 990kg |
|
UR3e

引用元:Universal
Robots公式HP |
3kg | 1m/s ※標準TCP 速度 |
500mm | ±0.03mm | 6 | 11.2kg |
|
UR5e

引用元:Universal
Robots公式HP |
5kg | 1m/s ※標準TCP 速度 |
850mm | ±0.03mm | 6 | 20.6kg |
|
UR10e

引用元:Universal
Robots公式HP |
10kg | 1m/s ※標準TCP 速度 |
1300mm | ±0.03mm | 6 | 33.5kg |
|
UR16e

引用元:Universal
Robots公式HP |
16kg | 1m/s ※標準TCP 速度 |
900mm | ±0.05mm | 6 | 33.1kg |
|
UR20

引用元:Universal Robots公式HP |
20kg | 2m/s ※標準TCP 速度 |
1750mm | ±0.05mm | 6 | 64kg |
|
MOTOMAN-HC10DTP
引用元:YASKAWA公式HP |
10kg | 1000mm/s(協働運転 モード) |
1379mm | 0.05mm | 6 | 48kg |
|
MOTOMAN-HC10DTP
ハンドキャリータイプ
引用元:YASKAWA公式HP |
10kg | 1000mm/s(協働運転 モード) |
1379mm | 0.05mm | 6 | 238kg |
|
MOTOMAN-HC10SDTP
(防じん・防滴仕様)
引用元:YASKAWA公式HP |
10kg | 1000mm/s(協働運転 モード) |
1082mm | 0.05mm | 6 | 56kg |
|
MOTOMAN-HC20DTP
(防じん・防滴仕様)
引用元:YASKAWA公式HP |
20kg | 1000mm/s(協働運転 モード) |
1379mm | 0.05mm | 6 | 140kg |
|
MOTOMAN-HC20SDTP
(防じん・防滴仕様)
引用元:YASKAWA公式HP |
20kg | 1000mm/s(協働運転 モード) |
1412mm | 0.05mm | 6 | 97kg |
|
MOTOMAN-HC30PL
(防じん・防滴仕様)
引用元:YASKAWA公式HP |
30kg | 1000mm/s(協働運転 モード) |
1600mm | 0.05mm | 6 | 140kg |
※質量:マニピュレーターそのものの重量。
※可搬重量:ロボットの動作性能を維持したまま持ち上げられる重量のこと。
※軸数:ロボットがもつ関節のこと。関節が多いほど、複雑かつ柔軟な動作が可能です。
※最大TCP速度:TCPはTool Center Pointの略称。最大TCP速度とは、ロボットアームの先端の最高速度です。
※位置繰り返し精度:同一条件下で教示したポイントに対して、繰り返し動作させた場合のTCPの変動幅(ばらつき)のこと。値が小さいほど正確に動作することを示しています。
※リーチ長:ロボットアームの長さのこと。長いほど、高いところ、遠いところへの運搬・作業が可能です。
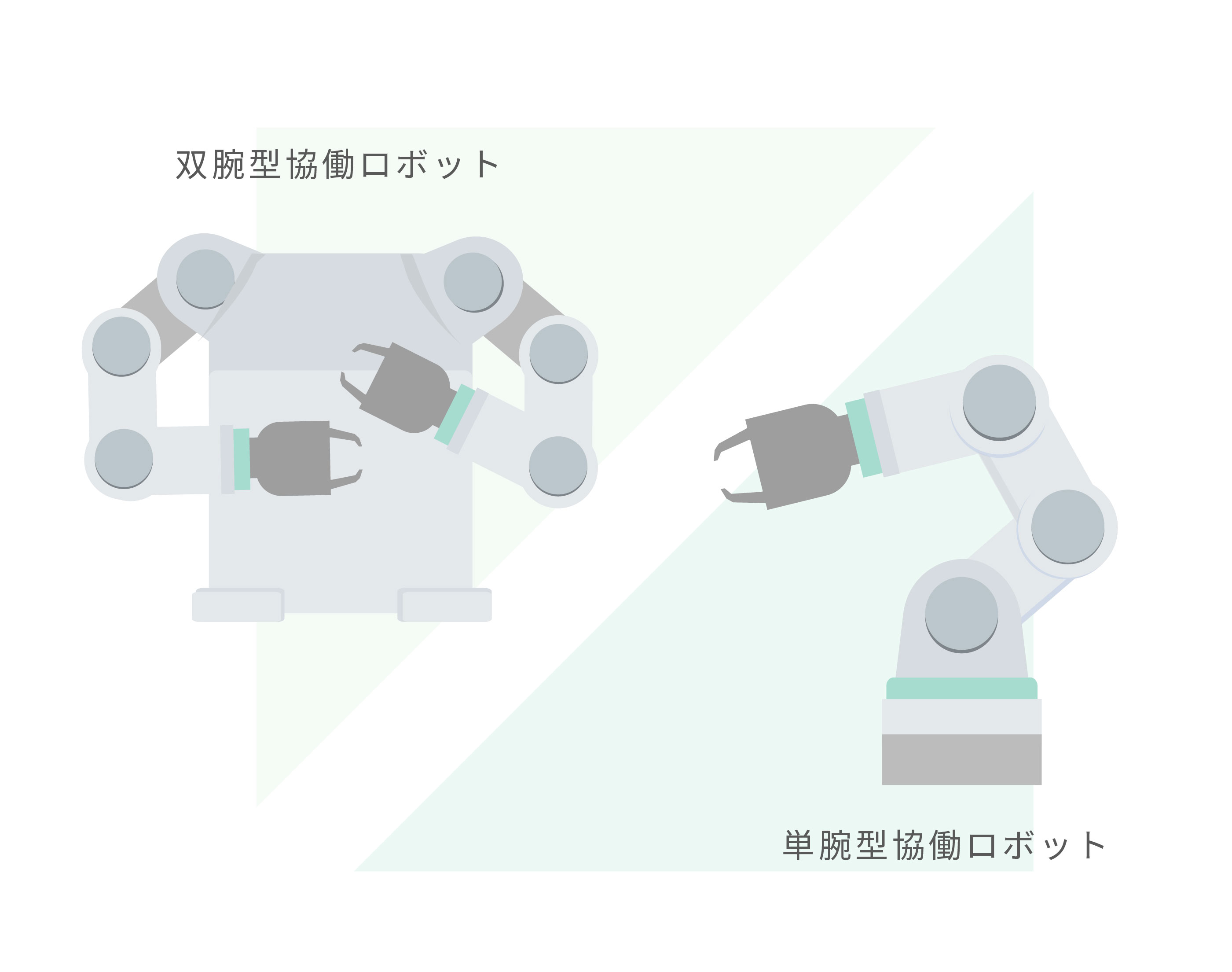
TYPE
COMPANY
 ※引用元:ABB公式HP
※引用元:ABB公式HP
https://new.abb.com/news/ja/detail/67898/abbs-yumi-robot-at-hawa
器用な14軸の動作性能を持つ双腕型の協働ロボットYuMi、産業ロボットに引けを取らない速度で稼働するSWIFTIなど、4種類の協働ロボットを展開するスイス発のメーカーです。
 ※引用元:ROBOTIQ公式HP
※引用元:ROBOTIQ公式HP
https://robotiq.com/ja/cobot-brands/aubo-robotics
中国・北京に本拠を構えるAUBO Robotics社が提供するAUBO-iシリーズは、コストを抑えて協働ロボットを導入したい人におすすめです。可搬重量は3kg、5kg、10kgから選べる3ラインを展開しています。
 ※引用元:住友商事マシネックス公式HP
※引用元:住友商事マシネックス公式HP
https://cobot-smx.jp/products/h2017.html
韓国のDoosanグループが2015年に設立した協働ロボットメーカー。同社とロボットSIerが開発した教育コンテンツの受講が可能など、充実したサポートを受けられるのが特徴です。
 ※引用元:JAKA公式HP
※引用元:JAKA公式HP
https://www.idec-fs.com/jaka/
高パフォーマンスと低コストを掲げる中国発の協働ロボット。プログラミングにはタブレットPC、携帯電話、PCを使用し、ドラッグ&ドロップでロボットが使えます。
 ※引用元:KUKA公式HP
※引用元:KUKA公式HP
https://www.kuka.com/ja-jp/製品・サービス/ロボットシステム/産業用ロボット/lbr-iiwa
ドイツ・アウグスブルクに本拠を置くKUKA社では、クリーンルーム対応、爆発の危険のあるエリア向け、衛生対応、防水仕様など、様々なタイプの協働ロボットと産業ロボットを扱っています。
 ※引用元:Techman Robot公式HP
※引用元:Techman Robot公式HP
https://www.tm-robot.com/ja/heavy-payload/
Techman Robotは台湾の協働ロボットメーカー。プログラミングの知識がない人でも簡単に使いこなせるよう、フローチャート式やダイレクトティーチングなども採用しています。
 ※引用元:カワダロボティクス公式HP
※引用元:カワダロボティクス公式HP
https://www.kawadarobot.co.jp/gallery/#lg=1&slide=10
「人と一緒に働くヒト型ロボット」というコンセプトのもと、製造現場の安全性確保と生産性の向上を目的に開発されたNEXTAGEは、双腕・ビジョン・コントローラを統合したオールインワンのロボットシステムです。
 ※引用元:デンソーウェーブ公式HPキャプチャ
※引用元:デンソーウェーブ公式HPキャプチャ
https://www.denso-wave.com/ja/robot/product/five-six/vs050-060.html
「どこでも、いますぐ、かんたんに。みんなと一緒に働くロボット」がコンセプトのCOBOTTAは持ち運びがしやすく、「人手が足りないから、ちょっと手伝ってほしい」に柔軟に対応します。
 ※引用元:ファナック公式HP
※引用元:ファナック公式HP
https://www.fanuc.co.jp/ja/product/robot/f_r_collabo.html
世界的産業用ロボットメーカーのFANUCでは、協働ロボットCRシリーズとCRXシリーズを展開。オンライン教育も充実しています。
 ※引用元:Universal
Robots公式HP
※引用元:Universal
Robots公式HP
https://www.universal-robots.com/ja/製品ラインナップ/ur20-robot/
ユニバーサルロボットは、世界中でも早くの頃から商業用の協働ロボットを生み出したメーカー。「Empowering People」という行動理念を掲げています。
 ※引用元:三菱電機公式HP
※引用元:三菱電機公式HP
https://www.mitsubishielectric.co.jp/fa/products/rbt/robot/pr/index.html
「人のように動く。人とともに働く」がコンセプトの「人手不足解消ロボット」MELFA ASSISTAを製造販売。パートナー会社が開発したアクセサリが豊富に揃っているので、様々な用途に使えます。
 ※引用元:住友重機械工業公式HP
※引用元:住友重機械工業公式HP
https://www.shi-mechatronics.jp/sawyer
住友重機械工業が手がけるSawyerは、過去の教示データと独自のロボットポジショニングシステムを併用することで、1台で多品種小ロットの生産現場に対応できるという特徴を持っています。
 ※引用元:安川電機公式HP
※引用元:安川電機公式HP
https://www.yaskawa.co.jp/product/robotics/collaborative
直感的に操作できるダイレクトティーチングや、スマートペンダントを利用することで簡単にロボットの教示ができる6軸垂直多関節の協働ロボットを製造・販売しています。
 ※引用元:川崎重工業公式HP
※引用元:川崎重工業公式HP
https://robotics.kawasaki.com/ja1/products/robots/dual-arm-scara/duAro1/
双腕スカラロボットduAroを製造・販売しています。人ひとり分のコンパクトな設置スペースで作業し、コントローラ内蔵の台車によって簡単に移動・設置が可能です。
 ※引用元:不二越公式HP
※引用元:不二越公式HP
https://www.nachi-fujikoshi.co.jp/pickup/vol38.html
不二越の協働ロボは、安全機能を搭載し、丸みのあるアームなど人にやさしい機能を備えています。世界レベルの技術力を目指し、高品質な材質を採用しているのが特徴です。
 ※引用元:ストーブリ公式HP
※引用元:ストーブリ公式HP
https://premium.ipros.jp/staubli/product/detail/2000212128/?hub=163&categoryId=35126
エネルギー用コネクタ、産業ロボット、繊維機械が事業の柱です。触れると停止、作業者を検知して自動で減速、停止する機能を備えた安全性の高い協働型ロボットが特徴です。
 ※引用元:ダイアディックシステムズ公式HP
※引用元:ダイアディックシステムズ公式HP
https://dyadic.co.jp/dsr2-400/
自己開発技術力を保有する企業です。DSR2-400は、パレタイジング、集荷作業から検査用カメラの位置決めなどの多用途対応、プログラム自動生成生機能を搭載しています。
 ※引用元:SIASUN公式HP
※引用元:SIASUN公式HP
https://www.siasun.com/index.php?m=content&c=index&a=show&catid=275&id=700
中国の総合ロボットメーカーです。軽量で高可搬重量対応汎用6軸タイプのḠシリーズ、微細な動作ができる高精度7軸モデルのSシリーズなどのラインナップがあります。
KNOWLEDGE

ロボット市場に
新しい価値をもたらす存在
協働ロボットは、一定の安全基準をクリアすれば人と同じ環境で作業ができるロボットです。2013年の規制緩和に加えて、ロボットの安全性が大きく向上したことによって、安全柵を使用せずに人と同じ空間で作業できるようになりました。
軽量・小型で設置がしやすく、繊細な動きに対応できる協働ロボットの登場により、コストやスペース、適性の問題でロボットの導入を諦めていた業界や企業・現場でも導入が進んでいます。
協働ロボットと産業ロボットの違いは、「安全柵の設置」だけではありません。詳しく解説します。

産業ロボットと協働ロボットは、使用環境と作業内容に大きな違いがあります。産業ロボットは安全柵で囲まれた専用スペースに固定し、ロボットのみで完結する単純作業を行うのに対し、協働ロボットは人と同じラインに入って人が行っている様々な作業に対応します。
プログラミングの簡便さも、大きく異なっています。産業ロボットには専門の技術者によるプログラミングが必要なのに対し、協働ロボットのインターフェースはわかりやすく、専門知識がなくてもプログラミングが可能。
「簡単」かつ「安全」と評価される協働ロボットですが、人と近い場所で作業を行う限り、100%安全である保証はありません。
実際に発生した産業ロボットの事故事例を踏まえ、協働ロボットでも同様の事故を起こさないためにどのような対策ができるかを考えましょう。

自動車の製造ラインで、半製品を搬送するローダー(産業ロボット)のクランプに、作業員が挟まれて死亡する事故が発生。ローダーに何らかの異常を発見した作業員が、電源を落としてラインを停止させることなく安全柵の中に入って被災したものと考えられています。異常発生時には必ず電源を切ってラインを完全停止させ、しかるのちに点検を行うといったルールを徹底する。また、インターロック式のドアが開放されたらラインが停止する機能がきちんと動作するよう、日頃から点検しておくなどの安全対策が求められます。
参照元:職場の安全サイトhttps://anzeninfo.mhlw.go.jp/anzen_pg/sai_det.aspx?joho_no=670

ドイツの自動車組み立て工場では、作業者がロボットアームに掴まれて金属板に押し付けられ、胸部圧迫によって死亡する事故が発生しました。被災者は、ロボット導入作業を行っていた取引先の従業員です。稼働中のロボットには接近しない、接近するなら電源を落とすことが基本ですが、導入作業中で電源を落とせないのであれば、メンテナンスモードなどで出力を落とすなどの対策が必要です。また、作業者単独ではなく監督者を配置して、非常時には即座に動力をカットできる態勢を取るべきでしょう。
参照元:今日も無事にただいま
http://itetama.jp/blog-entry-340.html

溶接ロボットに教示中の作業員が、他の作業員との連携不足によって負傷する事故が発生しました。この事故では被災者を含めた3名が合同で作業にあたっていましたが、作業の段取りがしっかりと共有されておらず、作業員のひとりが待機中にしていたロボットを、別の作業員が動かしたことが事故を誘発しました。複数の作業者がロボットの教示を行う場合は、操作方法や手順、合図の方法を周知すると同時に、操作スイッチに教示中である旨を表示するなどの安全対策が求められます。
参照元:職場の安全サイトhttps://anzeninfo.mhlw.go.jp/anzen_pg/sai_det.aspx?joho_no=635
産業ロボットよりパワーが小さく、安全対策が施されている協働ロボットにおいても、事故を起こさないための基本的な考え方は同じです。
ロボットの動作領域に入らないことは、大原則です。うっかり進入してしまわないためには、転倒対策なども必要でしょう。何らかの異常があった時には、まずロボットを完全に停止させることを徹底します。
メンテナンスや教示を実施する際は、その旨を周知徹底すると同時に、他の作業員が不用意にロボットを稼働させられない仕組みを作る。危険が伴う作業には、監督者を置く。そして、安全運用に必要な教育を、すべての関係者が受ける。
特に協働ロボットは産業ロボットと異なり、ロボットの操作方法や安全について学ぶ「特別教育」の受講がメーカーによって必須であったり、そうでなかったりとはっきりしていないのが現状です。とはいえ、安全対策を考えるなら極力受講し、事前にロボットについて正しい知識を得るよう努めましょう。
協働ロボットを導入したものの、使いこなせずブルーシートをかぶったままになっている、と耳にすることがあります。
果たして、協働ロボットは使えないのでしょうか?答えは「ノー」です。
使えないのは、導入者が正しい使い方を学んでいないから。使う側がしっかりとした知識を持つことで、協働ロボットの能力を120%活用できるはずです。
協働ロボットを使いこなし、大きく業績を伸ばした事例をご紹介します。いずれのケースでも、ロボットの特質を理解して適切な導入を行なったことが成功の鍵となりました。
協働ロボットの介在によって、人の作業の質が向上したケースもあります。まさに「協働」の賜物といえるでしょう。

アルミフレームを扱う会社が自動化の課題に直面し、協働ロボットを導入した事例です。導入により従業員を11人から3人に削減でき、少ない人数での夜間稼働も可能になりました。組み立て時間は5秒から4.5秒に短縮し、生産量は20%増加。投資の回収期間は、約2年で回収できる見込みとのことです。
参照元:ABB公式YouTubehttps://www.youtube.com/watch?v=IiypgiALdTo

繊維機械の製造工場にピック&プレース用の協働ロボットを導入したところ、わずか8ヶ月で生産性が300%もアップしました。協働ロボットのティーチングが容易でオペレータが無理なく使いこなせたこと、そしてロボットの導入によって工場の稼働時間が大幅に伸びたことが、大きな成果につながりました。
参照元:ユニバーサルロボット公式HPhttps://www.universal-robots.com/ja/事例の紹介/smew/

ボルト締めやシール材塗布など、作業員によって締付けトルクや塗布量、作業時間にばらつきが生じていた作業を協働ロボットが対応。微調整が必要な部品の取付けを人が担うようにしたことで作業品質が向上。さらに、一定のペースで定型作業を行う協働ロボットが人の間に入ることで、タクトタイムの向上にもつながりました。
参照元:安川電機公式HPhttps://www.e-mechatronics.com/application/detail-14.html
出力が低く安全機能を備えた協働ロボットのティーチングは特別教育を受けなくても行えますが、導入者に充分な知識があれば、さらにロボットを使いこなせるでしょう。
実際の現場からは、リスクアセスメントをどうすれば良いのかわからないといった声も多く聞かれますが、こういった問題も知識不足が背景にあるといえます。教育を受けることでどんなメリットがあるのか、具体的に解説します。
教育を受けるメリット1
「適切な使い方ができる」
教育を受けることによって、協働ロボットの能力を最大限に引き出し、適切に活用できます。自分たちの工場で起きている困りごとをもっとも理解しているのは、メーカーでもなく、ロボットSIerでもなく、ユーザー自身。知識を身につければ、効率よく課題を解決する道筋が見えてくるでしょう。
教育を受けるメリット2
「教育コストが
かからない」
産業ロボットの導入にはSIerが欠かせませんが、協働ロボットはユーザーがティーチングを行うことができます。ロボットSIerに依頼する費用がカットできると、トータルコストは協働ロボットの方が低くなります。ロボットは導入すれば終わりではありません。ラインの組み替えのたびにSIerに依頼するより、ユーザーがティーチングを行えば、コストも時間も大幅に節約できるはず。
AGENCY
提携するカワダロボティクス製ロボットの機能と性能を知り尽くしており、顧客の環境に適したロボット稼働システムを提供しています。
取り扱い主要メーカー:
カワダロボティクス製NEXTAGE
ラボにおける導入前試験運転、導入前トレーニング、また故障時には国内で修理対応を行うなど、充実のサポート体制を整えています。
取り扱い主要メーカー:
TechMan Robot
ロボットのマッピング、設定など操作に必要な知識が得られるロボティクスセミナーや、顧客のワークサンプルを預かって吸着具合の判定やタクトタイム(1回あたりの搬送時間)の計測を行い、報告書を発行するロボティクステスティングなどを提供しています。
取り扱い主要メーカー:
TechMan Robot
ロボットやロボットスーツとともにレーザー関連製品、計測関連製品を手がけるメーカー。ユニバーサルロボットのトレーニングセンターとして、認定トレーナーによるURアカデミーを開催しています。
取り扱い主要メーカー:
ユニバーサルロボット
「単純作業の自動化」をキーワードに複数メーカーの協働ロボットやロボットハンド、アシストスーツなどを取り扱っています。
取り扱い主要メーカー:
AUBO-robotics/HAN'S ROBOT社製 協働ロボット「Elfinシリーズ」/DSR02-400(ももこちゃん)
Doosan Robotsの販売代理店。ロボットSIerと共同開発した教育プログラムを提供するほか、導入からアフターサポートまで一貫して行う専門チームを編成しています。
取り扱い主要メーカー:
Doosan Robotics
協働ロボットや無人搬送台車、ロボットハンド、その他のロボット周辺機器を組み合わせることで、ものづくりの現場に適切なソリューションを提供しています。
取り扱い主要メーカー:
川崎重工業 協働ロボット duAro(デュアロ)/ユニバーサルロボット社製 協働ロボット「UR/URe」
「モノづくり」を支えるソリューションアドバイザーとして、特に食品・化粧品・医薬品の製造現場の生産効率向上や自動化ニーズに応えています。
取り扱い主要メーカー:
TechMan Robot
電機、電子部品の各メーカーを仲介する業界のリーディングカンパニーです。顧客対応力があり、中国大手ロボットメーカーSIASUN社の日本正規代理店です。
取り扱い主要メーカー:
SIASUN
オムロン社の100%子会社です。生産ラインや自動化設備エンジニアリングを手がけ、工場内部設計から立ち上げとアフターサービスまで一貫対応です。
取り扱い主要メーカー:
OMRON・ABB・DENSO WAVE
オムロン社をメインに協働ロボの国内外メーカー製品を取り扱っています。メーカー認定SE、セーフティアセッサ資格認証の人材が在籍しています。
取り扱い主要メーカー:
オムロン・シナノケンシ